



ફોર એક્સિસ રોબોટ સિરીઝ



ફોર એક્સિસ રોબોટ સિરીઝ

ચાર અક્ષો રોબોટ શ્રેણી JZJ100B-230 100KG

ચાર અક્ષો રોબોટ શ્રેણી JZJ25B-180 25KG

ચાર અક્ષોની રોબોટ શ્રેણી JZJ15B-140 15KG
સ્વચાલિત હેન્ડલિંગ રોબોટનો સંક્ષિપ્ત પરિચય:
1. લોડિંગ અને અનલોડિંગ રોબોટમાં ઘણાં કિલોગ્રામથી લઈને ઘણા સો કિલોગ્રામ સુધીનો મોટો ભાર છે;
2. દોડવાની ગતિ ઝડપી અને એડજસ્ટેબલ છે;
3. લવચીક ક્રિયા, જટિલ હેન્ડલિંગ અને લોડિંગ અને અનલોડિંગ કાર્યો પૂર્ણ કરી શકે છે;
4. ઉચ્ચ વિશ્વસનીયતા અને સરળ જાળવણી.
It. તે ભારે પદાર્થોની જેમ કે પકડવું, પરિવહન કરવું, ઉથલાવી નાખવું, ડોકીંગ કરવું વગેરે ત્રિ-પરિમાણીય અવકાશ ચળવળને પૂર્ણ કરી શકે છે. તે andફ-લાઇન અને ઉત્પાદન ભાગોની એસેમ્બલીને સામગ્રીને સંચાલિત કરવા અને એસેમ્બલ કરવા માટે એક આદર્શ સાધન પ્રદાન કરે છે. લોડિંગ અને અનલોડિંગ રોબોટ મજૂરની તીવ્રતાને ઘટાડે છે અને સલામત સામગ્રીનું નિયંત્રણ કરે છે. તે જ સમયે, તે વિશિષ્ટ વાતાવરણને પણ મળી શકે છે, જેમ કે ખતરનાક સ્થળો જ્યાં વિસ્ફોટ-પ્રૂફ વર્કશોપના કર્મચારીઓ પ્રવેશી શકતા નથી, અને સિસ્ટમ સોલ્યુશન્સ પ્રદાન કરે છે.
A. વિવિધ પ્રકારના બિન-માનક ફિક્સર સાથે, રોબોટ વર્કપીસના વિવિધ આકારોને પકડી શકે છે, અને operatorપરેટર સરળતાથી ઉપાડી શકે છે અને ભારને ખસેડી શકે છે, ફેરવી શકે છે, આગળ બદલી શકે છે અને રોલ ઓવર કરી શકે છે. અને લોડ ઝડપથી અને સચોટ રીતે પ્રીસેટ સ્થિતિમાં મૂકવામાં આવે છે. તેની મદદથી, એક વ્યક્તિ તે વસ્તુઓ સરળતાથી સંચાલિત કરી શકે છે જે ફક્ત થોડા લોકો જ ખસેડી શકે છે.
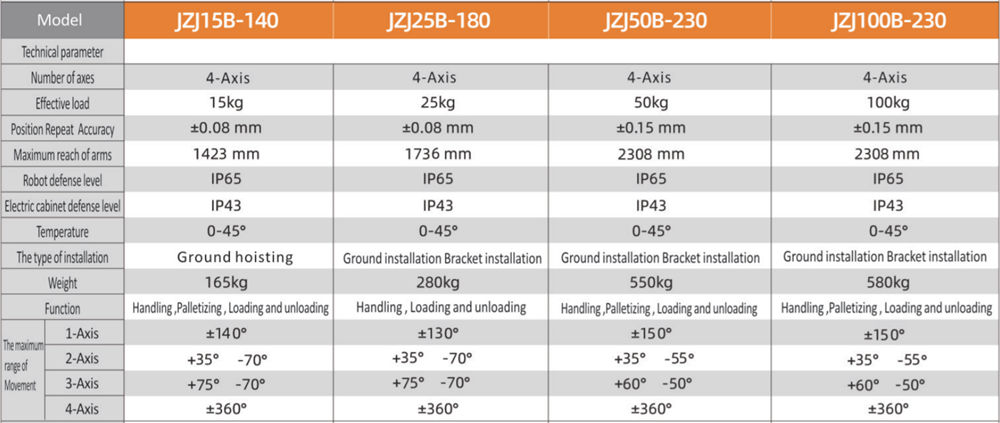
ચાર એક્સિસ રોબોટ સિરીઝ તકનીકી પરિમાણો
પરિવહન રોબોટ્સના મુખ્ય ફાયદાઓ શું છે?
1. પેલેટીઝિંગ અને હેન્ડલિંગ રોબોટ ઓછી જગ્યા ધરાવે છે, જે ગ્રાહક વર્કશોપમાં પ્રોડક્શન લાઇનના લેઆઉટને અનુકૂળ છે, અને મોટા વેરહાઉસ વિસ્તારને સુરક્ષિત રાખી શકે છે. અને રોબોટ અસરકારક રીતે સાંકડી જગ્યામાં મૂકી શકાય છે.
2. પેલેટીઝિંગ અને પરિવહન રોબોટની સરળ રચના અને થોડા ભાગો છે. તેથી, સ્પેર પાર્ટ્સમાં નિષ્ફળતાનો દર, વિશ્વસનીય કામગીરી, સરળ જાળવણી અને થોડા સ્પેરપાર્ટ્સ છે.
3. પેલેટીઝિંગ અને હેન્ડલિંગ રોબોટનો વીજ વપરાશ ઓછો છે. સામાન્ય સંજોગોમાં, પેલેટીઇઝિંગ અને રોબોટ પહોંચાડવાની શક્તિ લગભગ 26KW છે, જ્યારે પેલેટીઝિંગ રોબોટની શક્તિ લગભગ 5kW છે. ગ્રાહકોના operatingપરેટિંગ ખર્ચમાં ખૂબ ઘટાડો.
The. પેલેટીઝિંગ અને હેન્ડલિંગ રોબોટની મજબૂત ઉપયોગિતા છે. જ્યારે ગ્રાહકના ઉત્પાદનનું કદ, વોલ્યુમ, આકાર અને પalલેટના આકાર અને કદમાં ફેરફાર થાય છે, ત્યારે ટચ સ્ક્રીન પરના થોડો ફેરફાર દ્વારા ગ્રાહકના સામાન્ય ઉત્પાદનને અસર થશે નહીં. પેલેટીઇઝિંગ અને ટ્રાન્સપોર્ટિંગ રોબોટનું પુનર્નિર્માણ ખૂબ જ મુશ્કેલીકારક છે, તે પણ અનુભૂતિ કરી શકાતું નથી.
5. પેલેટીઝિંગ અને હેન્ડલિંગ રોબોટના તમામ નિયંત્રણો નિયંત્રણ કેબિનેટની સ્ક્રીન પર ચલાવી શકાય છે, અને theપરેશન ખૂબ જ સરળ છે.
6. જ્યાં સુધી પ્રારંભિક બિંદુ અને પ્લેસમેન્ટ પોઇન્ટ નક્કી કરવામાં આવે છે, ત્યાં સુધી શિક્ષણ પદ્ધતિ સમજવી સરળ છે.